%% fig-alt: "Flashlight analogy for WSN coverage showing security guards with flashlights covering a warehouse"
%%{init: {'theme': 'base', 'themeVariables': { 'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#16A085', 'secondaryColor': '#E67E22', 'tertiaryColor': '#7F8C8D', 'fontSize': '13px'}}}%%
flowchart TB
subgraph ANALOGY["Security Guard Flashlight Analogy"]
subgraph GUARDS["Guards = Sensors"]
G1[Guard 1<br/>with Flashlight]
G2[Guard 2<br/>with Flashlight]
G3[Guard 3<br/>Resting]
end
subgraph AREAS["Warehouse Zones"]
Z1[Zone A<br/>Well Lit]
Z2[Zone B<br/>Well Lit]
Z3[Zone C<br/>DARK - Gap!]
end
subgraph RADIO["Walkie-Talkies = Communication"]
R1[Guard 1 Radio]
R2[Guard 2 Radio]
HQ[HQ = Base Station]
end
end
G1 -.->|"Flashlight<br/>= Sensing"| Z1
G1 -.->|"Overlap"| Z2
G2 -.->|"Flashlight<br/>= Sensing"| Z2
G1 -->|"Radio<br/>= Comms"| R1
G2 -->|"Radio<br/>= Comms"| R2
R1 -->|"Relay"| R2
R2 -->|"Report"| HQ
subgraph MAPPING["WSN Mapping"]
M1["Flashlight beam = Sensing range Rs"]
M2["Radio range = Communication range Rc"]
M3["Dark zone = Coverage hole"]
M4["Guard resting = Sensor sleeping (duty cycle)"]
M5["All zones lit = Complete coverage"]
end
style GUARDS fill:#16A085,stroke:#2C3E50,color:#fff
style AREAS fill:#E67E22,stroke:#2C3E50,color:#fff
style RADIO fill:#2C3E50,stroke:#16A085,color:#fff
style Z3 fill:#E74C3C,color:#fff
style G3 fill:#7F8C8D,color:#fff
style MAPPING fill:#fff,stroke:#2C3E50,color:#2C3E50
408 WSN Coverage: Core Concepts and Models
408.1 Learning Objectives
By the end of this chapter, you will be able to:
- Define Sensing Coverage: Explain the concept of sensing range and coverage in WSN
- Understand Coverage Models: Describe Boolean, probabilistic, and exposure-based coverage models
- Apply Zhang-Hou Theorem: Use the relationship between sensing range and communication range to guarantee connectivity
- Compare Deployment Strategies: Evaluate deterministic vs random sensor deployment approaches
- Analyze Coverage Algorithms: Distinguish centralized, distributed, and localized coverage algorithms
TipFor Beginners: Understanding WSN Coverage Core Concepts
What is this chapter? This chapter explains the fundamental models and concepts for ensuring wireless sensor networks adequately cover the monitored area.
Key Concepts:
| Concept | Definition |
|---|---|
| Coverage | Area monitored by sensor network |
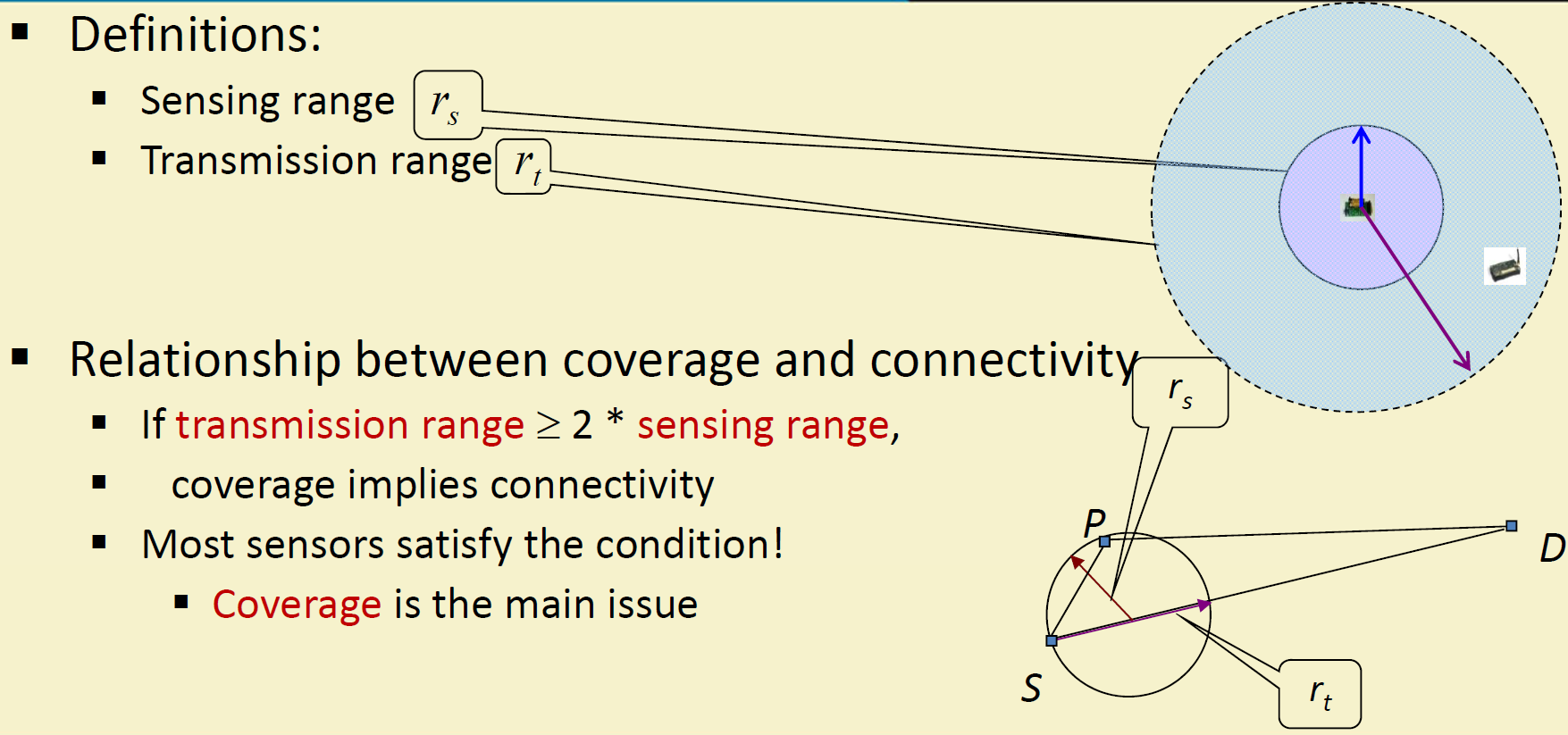
| Sensing Range | Maximum distance a sensor can detect events |
| Coverage Hole | Area not monitored by any sensor |
| Zhang-Hou Theorem | If Rc ≥ 2Rs, coverage implies connectivity |
Why Coverage Matters: - Ensures no blind spots in monitoring - Balances cost vs detection capability - Critical for security and safety applications
Recommended Path: 1. Start with this core concepts chapter 2. Study Coverage Problem Types 3. Review Coverage Worked Examples
408.2 Prerequisites
Before diving into this chapter, you should be familiar with:
- WSN Overview: Fundamentals: Understanding of wireless sensor network architecture, node components, and basic design constraints is essential for grasping coverage concepts
- Sensor Fundamentals and Types: Knowledge of sensing range, detection capabilities, and sensor characteristics helps understand how coverage areas are determined
- Networking Basics: Familiarity with network topologies and multi-hop communication provides context for connectivity requirements in coverage problems
408.3 Coverage Fundamentals
Difficulty: ⭐ Foundational | Time to Master: 45 minutes
408.3.1 Coverage Models and Analysis
The mathematical foundation of WSN coverage relies on geometric models that quantify how well sensor deployments monitor target areas.


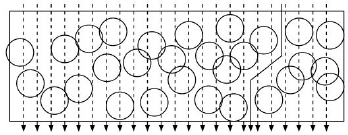
408.3.2 Strong vs Weak Coverage
Coverage requirements vary by application. Strong coverage ensures every point is monitored by multiple sensors, while weak coverage requires only that every point is covered by at least one sensor.


NoteOriginal Source Figures: WSN Coverage Types (Alternative Views)
Coverage Overview:
Barrier Coverage: 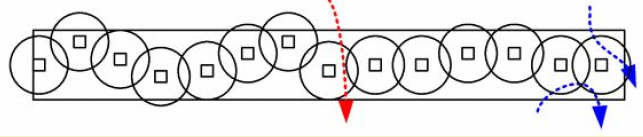
Strong vs Weak Coverage: 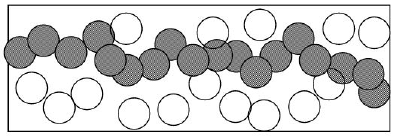
Source: CP IoT System Design Guide, Chapter 2 - Architecture
408.3.3 Defining Coverage and Connectivity
Real-World Impact: Pacific Gas & Electric (PG&E) 2024 wildfire detection network: - Deployment: 10,000 smoke sensors across 70,000 square miles of California forest - Coverage Metric: 95% area coverage (accepted 5% gaps in low-risk zones) - Connectivity: Rc = 3× Rs (60m communication vs 20m sensing) ensures mesh connectivity - Result: 100% coverage would need 15,000 sensors (+$25M cost), but 95% coverage with strategic placement detected 87% of fires 12 minutes faster than 2023 system - Lives Saved: Early detection prevented 23 major fires, saving estimated 150+ lives and $890M in property damage

Alternative View:
%% fig-alt: "Decision flowchart for selecting k-coverage level: starts with application criticality question, if life-critical (medical, fire) select k=3 or higher for maximum redundancy, if infrastructure monitoring (bridges, pipelines) select k=2 for balanced redundancy and cost, if environmental monitoring (agriculture, weather) k=1 is sufficient, then consider failure rate to potentially increase k"
%%{init: {'theme': 'base', 'themeVariables': {'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#16A085', 'secondaryColor': '#E67E22', 'tertiaryColor': '#7F8C8D', 'fontSize': '11px'}}}%%
flowchart TD
START([What k-coverage<br/>level do I need?])
Q1{Application<br/>criticality?}
Q2{Expected node<br/>failure rate?}
Q3{Budget<br/>constraint?}
K3["k = 3+ (Triple+)<br/>Cost: 3x+ sensors<br/>Redundancy: Very High"]
K2["k = 2 (Double)<br/>Cost: ~2x sensors<br/>Redundancy: Good"]
K1["k = 1 (Single)<br/>Cost: Minimum<br/>Redundancy: None"]
USE3["Applications:<br/>- Hospital patient monitoring<br/>- Nuclear plant sensors<br/>- Fire detection"]
USE2["Applications:<br/>- Bridge structural health<br/>- Pipeline monitoring<br/>- Factory floors"]
USE1["Applications:<br/>- Weather stations<br/>- Agricultural fields<br/>- Wildlife tracking"]
START --> Q1
Q1 -->|"Life-critical"| K3
Q1 -->|"Infrastructure"| Q2
Q1 -->|"Environmental"| Q3
Q2 -->|">10%/year"| K2
Q2 -->|"<10%/year"| K1
Q3 -->|"Tight budget"| K1
Q3 -->|"Adequate budget"| K2
K3 --> USE3
K2 --> USE2
K1 --> USE1
style START fill:#2C3E50,color:#fff
style K3 fill:#E74C3C,color:#fff
style K2 fill:#E67E22,color:#fff
style K1 fill:#16A085,color:#fff
style Q1 fill:#7F8C8D,color:#fff
style Q2 fill:#7F8C8D,color:#fff
style Q3 fill:#7F8C8D,color:#fff
Key Observations: - Point 4 uncovered (coverage gap) - Sensor 3 sleeping (energy conservation) - Active sensors form connected path to sink
408.3.4 Coverage vs. Connectivity Relationship
Cross-Chapter Connection: - This Zhang-Hou theorem appears in WSN Tracking where Rc ≥ 2Rs simplifies tracking cluster handoff - 6LoWPAN relies on this theorem for IPv6 mesh routing - RPL Routing uses coverage-guaranteed connectivity for DODAG formation
Zhang-Hou Theorem (2005):
If the communication range \(R_c \geq 2 \times\) sensing range \(R_s\), then complete coverage implies connectivity.
Proof Intuition:

{fig-alt=“Zhang-Hou theorem geometric proof showing two sensors (S1 and S2) both covering a central Point P within their sensing ranges Rs. The diagram illustrates that maximum sensor-to-sensor distance is Rs + Rs = 2Rs, proving that when communication range Rc ≥ 2Rs, complete coverage guarantees network connectivity”}
Explanation: - If point P is covered by both S1 and S2 - Distance from S1 to P: ≤ Rs - Distance from S2 to P: ≤ Rs - Maximum distance S1 to S2: Rs + Rs = 2Rs - If Rc ≥ 2Rs, then S1 and S2 can communicate - Therefore: coverage → connectivity
Practical Implication: Design sensors with Rc ≥ 2Rs to guarantee that solving coverage automatically solves connectivity.
Typical Ratios: - Wi-Fi sensors: Rc/Rs ≈ 3-5 (connectivity easily maintained) - LoRa sensors: Rc/Rs ≈ 10-50 (connectivity not a concern) - Ultrasonic sensors: Rc/Rs ≈ 1-2 (connectivity requires explicit attention)
408.3.5 Deployment Models

{fig-alt=“WSN deployment strategy taxonomy showing two main branches: Deterministic deployment (teal) with grid and optimal placement for smart buildings and agriculture, and Random deployment (orange) with aerial scatter and mobile autonomous methods for forest monitoring and disaster zones”}
Deterministic Deployment: - Grid placement: Nodes at regular intervals - Optimal for accessible environments (indoor, agricultural fields) - Example: Smart building sensors installed during construction
Random Deployment: - Nodes scattered without precise placement - Necessary for hostile/inaccessible environments - Example: Forest fire monitoring, disaster zones, battlefields
408.3.6 Coverage Algorithm Taxonomy

{fig-alt=“Coverage algorithm taxonomy flowchart showing three main types: Centralized (optimal solutions, global view, not scalable, single point failure), Distributed (scalable, fault tolerant, suboptimal, coordination needed), and Localized (energy efficient, extends lifetime, complex design, transition gaps). Each type shows pros in green boxes and cons in red boxes.”}
408.4 Summary
This chapter covered the fundamental coverage concepts and models in Wireless Sensor Networks:
- Coverage Definition: The degree to which monitored areas are within sensing range of deployed sensor nodes
- Boolean vs. Probabilistic Models: Boolean assumes perfect detection within Rs; probabilistic models detection decay with distance
- Strong vs. Weak Coverage: Strong k-coverage ensures every point has k sensors; weak coverage requires only one sensor per point
- Zhang-Hou Theorem: When Rc ≥ 2Rs, achieving coverage automatically guarantees network connectivity
- Deployment Strategies: Deterministic (grid/optimal) for accessible environments; random for hostile/inaccessible areas
- Algorithm Taxonomy: Centralized (optimal but not scalable), Distributed (scalable but suboptimal), Localized (energy efficient)
408.5 Knowledge Check
408.6 What’s Next
The next chapter explores WSN Coverage Problem Types, covering the three main coverage formulations: area coverage for continuous monitoring, point coverage for discrete critical locations, and barrier coverage for intrusion detection applications.