%%{init: {'theme': 'base', 'themeVariables': {'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#E67E22', 'secondaryColor': '#ECF0F1', 'tertiaryColor': '#fff', 'nodeTextColor': '#2C3E50'}}}%%
graph TB
subgraph "UAV Star Topology"
GCS["Ground Control<br/>Station<br/>(Central Hub)"]
UAV1["UAV 1"]
UAV2["UAV 2"]
UAV3["UAV 3"]
UAV4["UAV 4"]
UAV5["UAV 5"]
GCS <-->|Command/Control| UAV1
GCS <-->|Telemetry| UAV2
GCS <-->|Mission Data| UAV3
GCS <-->|Status Updates| UAV4
GCS <-->|Video Feed| UAV5
Note["All UAV-to-UAV communication<br/>must go through GCS"]
end
style GCS fill:#2C3E50,stroke:#16A085,color:#fff
style UAV1 fill:#E67E22,stroke:#2C3E50,color:#fff
style UAV2 fill:#E67E22,stroke:#2C3E50,color:#fff
style UAV3 fill:#E67E22,stroke:#2C3E50,color:#fff
448 UAV Network Topologies
448.1 Learning Objectives
By the end of this chapter, you will be able to:
- Compare Star and Mesh Topologies: Analyze the advantages and disadvantages of centralized vs distributed UAV network configurations
- Design Multi-Hop Networks: Plan relay-based UAV networks for extended coverage in challenging terrain
- Select Appropriate Topology: Choose the right network topology based on mission requirements, swarm size, and resilience needs
- Calculate Relay Requirements: Determine the number of relay UAVs needed for a given coverage area and communication range
448.2 Prerequisites
Before diving into this chapter, you should be familiar with:
- UAV Introduction: Basic UAV network concepts and FANET fundamentals
- UAV Network Features: Understanding core capabilities and challenges of UAV networks
448.3 UAV Network Topologies
448.3.1 Star Topology
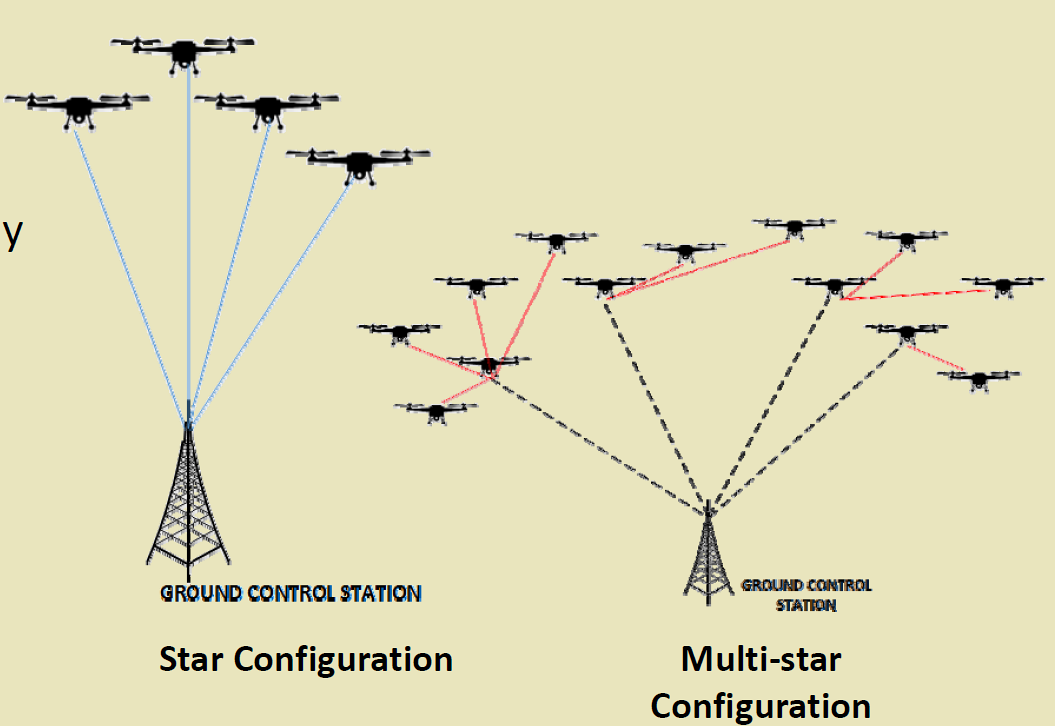

In star topology, UAVs communicate directly with a ground control station (GCS) or through designated hub UAVs.
Advantages: - Simple communication model - Easy coordination from GCS - Reduced inter-UAV interference
Disadvantages: - High latency (everything through GCS) - Single point of failure (GCS dependency) - Limited scalability - No local communication between UAVs
Use Cases: - Small swarms (< 10 UAVs) - Surveillance missions with central monitoring - Agricultural mapping
448.3.2 Mesh Topology
NoteWorked Example: Multi-Hop Mesh Network for Search and Rescue
Scenario: A search and rescue team deploys 8 UAVs to find a missing hiker in a mountainous valley. The valley is 12 km long but only 2 km wide, with steep terrain blocking direct line-of-sight communication to the command post at the valley entrance.
Given: - 8 UAVs with 2 km air-to-air communication range - Command post at valley entrance (km 0) - Search area: km 2 to km 12 (10 km length) - Required: Real-time video relay from any search UAV to command post - Data rate needed: 5 Mbps per active video stream - Maximum latency tolerance: 500 ms
Steps: 1. Calculate relay UAV spacing: With 2 km range, space relay UAVs at 1.8 km for reliable links (10% margin). Coverage from km 0 to km 12 requires: 12 km / 1.8 km = 7 relay positions (including command post link) 2. Allocate UAVs to roles: Need 6 relay UAVs to form backbone (km 1.8, 3.6, 5.4, 7.2, 9.0, 10.8). Remaining 2 UAVs serve as mobile search units with thermal cameras 3. Calculate maximum hop count: Farthest search point (km 12) to command (km 0): Data travels through 6 relay UAVs + 1 hop to search UAV = 7 hops maximum 4. Verify latency: Each hop adds approximately 50 ms (processing + transmission). Total: 7 x 50 ms = 350 ms < 500 ms requirement (passed) 5. Verify bandwidth: 5 Mbps video through 7 hops. Each relay handles up to 2 search UAVs streaming simultaneously. Relay capacity: 54 Mbps (802.11a). 2 x 5 Mbps = 10 Mbps much less than 54 Mbps (passed) 6. Calculate network resilience: With mesh topology, if relay at km 5.4 fails, UAVs at km 3.6 and km 7.2 can communicate directly (3.6 km apart, slightly exceeds 2 km range). Single point of failure exists - recommend adding 1 redundant relay
Result: A 6-relay backbone with 2 mobile search UAVs provides continuous video connectivity across the 12 km valley with 350 ms latency.
Key Insight: Mesh topology’s resilience depends on link redundancy. In constrained geometries (valleys, corridors), the mesh may degrade to a near-linear chain with limited alternate paths.
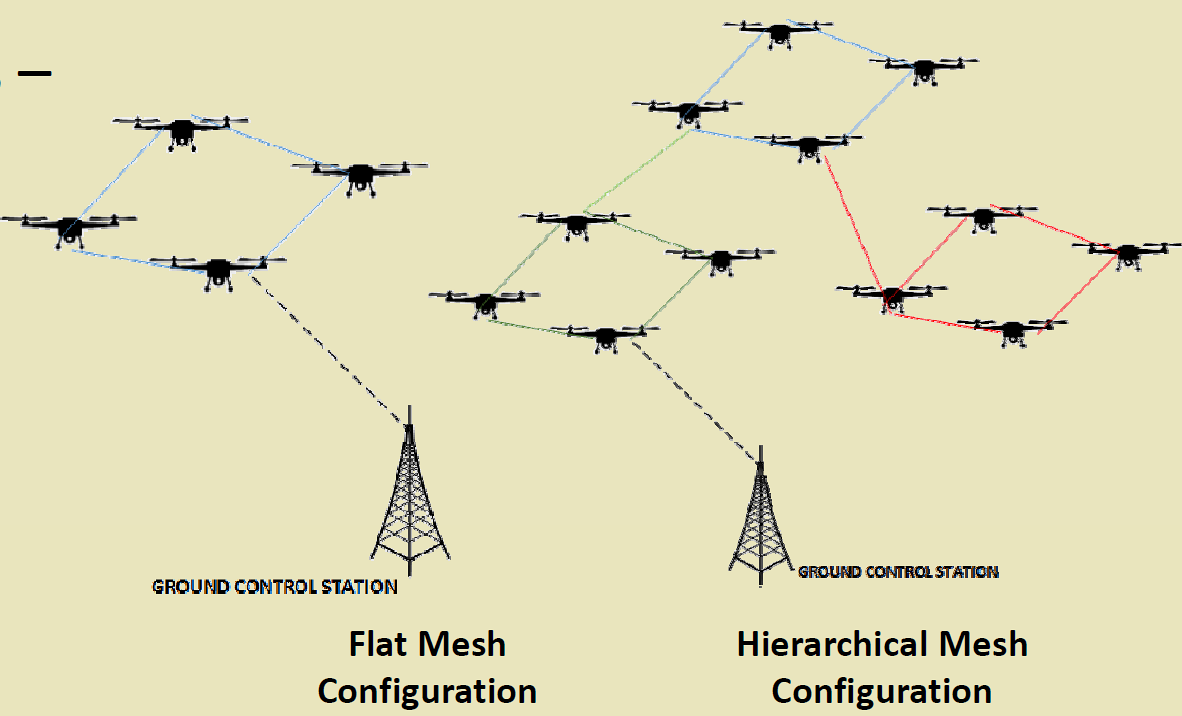
In mesh topology, UAVs communicate peer-to-peer, forming a fully or partially connected network.
%%{init: {'theme': 'base', 'themeVariables': {'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#E67E22', 'secondaryColor': '#ECF0F1', 'tertiaryColor': '#fff', 'nodeTextColor': '#2C3E50'}}}%%
graph TB
subgraph "UAV Mesh Topology"
UAV1["UAV 1"]
UAV2["UAV 2"]
UAV3["UAV 3"]
UAV4["UAV 4"]
UAV5["UAV 5"]
UAV1 <-.->|Peer-to-Peer| UAV2
UAV1 <-.->|Peer-to-Peer| UAV3
UAV1 <-.->|Peer-to-Peer| UAV4
UAV2 <-.->|Peer-to-Peer| UAV3
UAV2 <-.->|Peer-to-Peer| UAV5
UAV3 <-.->|Peer-to-Peer| UAV4
UAV3 <-.->|Peer-to-Peer| UAV5
UAV4 <-.->|Peer-to-Peer| UAV5
GCS["Ground Control<br/>Station<br/>(Optional)"]
UAV1 -.->|Reporting| GCS
UAV5 -.->|Reporting| GCS
Note["Multiple redundant paths<br/>Distributed decision-making<br/>Self-healing network"]
end
style UAV1 fill:#2C3E50,stroke:#16A085,color:#fff
style UAV3 fill:#E67E22,stroke:#2C3E50,color:#fff
style UAV5 fill:#16A085,stroke:#2C3E50,color:#fff
style GCS fill:#7F8C8D,stroke:#2C3E50,color:#fff
Advantages: - Resilient to node failures - Multi-path routing options - Local communication without GCS - Scalable
Disadvantages: - Complex routing protocols - Higher energy consumption (more transmissions) - Coordination challenges
Use Cases: - Large swarm operations - Search and rescue (redundancy needed) - Distributed sensing missions

448.3.3 Topology Comparison
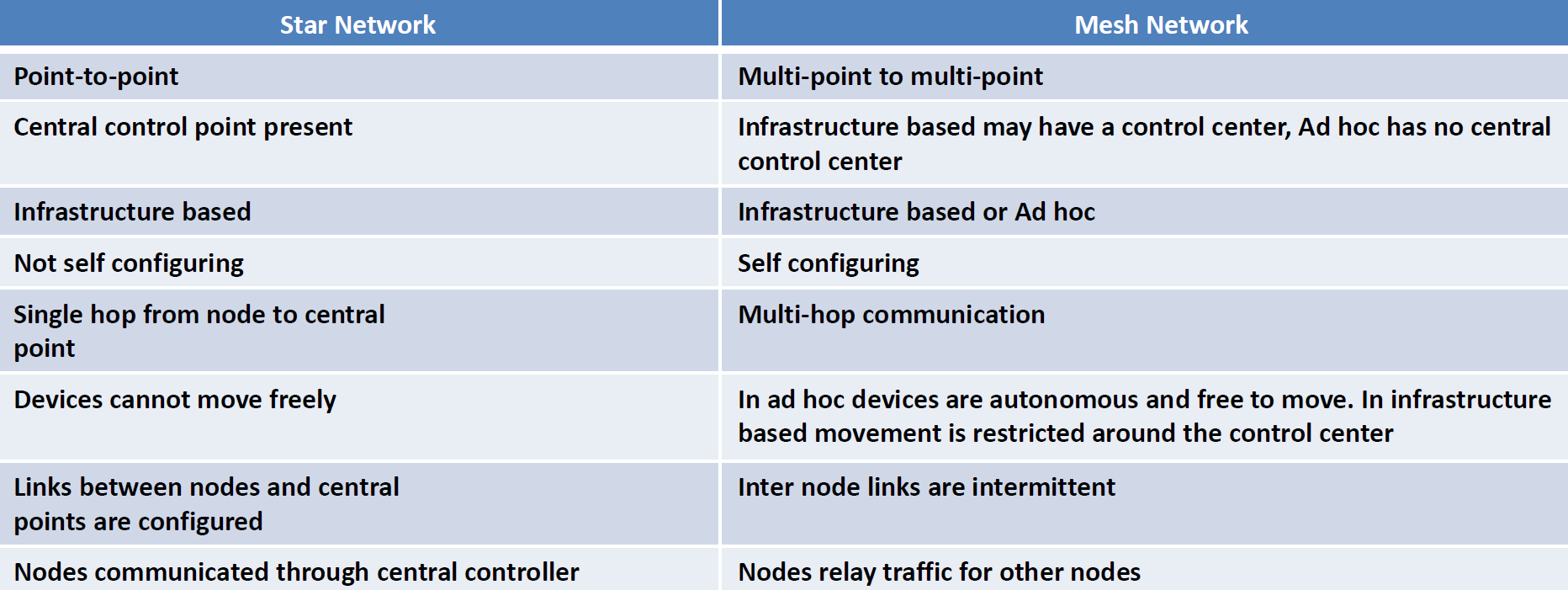

| Aspect | Star | Mesh |
|---|---|---|
| Complexity | Low | High |
| Scalability | Limited (< 20 UAVs) | High (100+ UAVs) |
| Latency | High (via GCS) | Low (direct paths) |
| Resilience | Low (GCS failure critical) | High (multi-path) |
| Energy | Moderate | Higher |
| Coordination | Centralized (easy) | Distributed (complex) |
| Use Case | Small missions | Large swarms, resilience needed |
448.4 Knowledge Check
448.5 Summary
This chapter examined UAV network topologies and their applications:
- Star Topology: Centralized architecture with simple coordination but single point of failure, suitable for small swarms (< 10 UAVs) with central monitoring requirements
- Mesh Topology: Distributed peer-to-peer architecture providing resilience and scalability for large swarms (100+ UAVs) and missions requiring redundancy
- Topology Selection: Choose based on swarm size, resilience requirements, area coverage, and coordination complexity
- Multi-Hop Planning: Calculate relay spacing, hop count, and latency to ensure coverage in challenging terrain
- Trade-offs: Star offers simplicity and low energy; mesh offers resilience at cost of complexity and energy consumption
448.6 What’s Next
The next chapter explores UAV Swarm Coordination, examining how multiple UAVs work together using distributed algorithms for task allocation, formation control, and cooperative mission execution.