%% fig-alt: "Gateway selection process in FANET: Network partitioned into three sub-areas (A with 5 UAVs, B with 6 UAVs, C with 4 UAVs), stability score computed for each UAV using weighted formula combining link quality, energy level, and centrality, best scoring UAV in each sub-area selected as gateway, three gateways connect to ground control station reducing interference and load, continuous monitoring enables dynamic reselection when conditions change"
%%{init: {'theme': 'base', 'themeVariables': {'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#E67E22', 'secondaryColor': '#ECF0F1', 'tertiaryColor': '#fff', 'nodeTextColor': '#2C3E50'}}}%%
graph TB
subgraph "Gateway Selection in FANET"
Network["FANET Network<br/>(Multiple UAVs)"]
Partition["Partition into<br/>Sub-Areas"]
SubA["Sub-Area A<br/>(5 UAVs)"]
SubB["Sub-Area B<br/>(6 UAVs)"]
SubC["Sub-Area C<br/>(4 UAVs)"]
SelectA["Select Gateway A<br/>(Best stability score)"]
SelectB["Select Gateway B<br/>(Best stability score)"]
SelectC["Select Gateway C<br/>(Best stability score)"]
Score["Stability Score =<br/>α×LinkQuality +<br/>β×EnergyLevel +<br/>γ×Centrality"]
GWA["Gateway A<br/>(GCS Link)"]
GWB["Gateway B<br/>(GCS Link)"]
GWC["Gateway C<br/>(GCS Link)"]
GCS["Ground Control<br/>Station"]
Monitor["Continuous<br/>Monitoring &<br/>Reselection"]
end
Network --> Partition
Partition --> SubA
Partition --> SubB
Partition --> SubC
Score -.->|Evaluate| SelectA
Score -.->|Evaluate| SelectB
Score -.->|Evaluate| SelectC
SubA --> SelectA
SubB --> SelectB
SubC --> SelectC
SelectA --> GWA
SelectB --> GWB
SelectC --> GWC
GWA --> GCS
GWB --> GCS
GWC --> GCS
GCS --> Monitor
Monitor -.->|Update| SelectA
style Network fill:#2C3E50,stroke:#16A085,color:#fff
style Score fill:#E67E22,stroke:#2C3E50,color:#fff
style GCS fill:#16A085,stroke:#2C3E50,color:#fff
452 FANET: Gateway Selection and Optimization
452.1 Learning Objectives
By the end of this chapter, you will be able to:
- Design Gateway Selection Algorithms: Implement stability-score-based gateway selection for FANETs
- Optimize Sub-Area Partitioning: Divide FANET coverage areas for efficient gateway distribution
- Balance Multiple Criteria: Combine link quality, energy level, and centrality for gateway decisions
- Implement Continuous Monitoring: Design systems for dynamic gateway reselection as conditions change
452.2 Prerequisites
Before diving into this chapter, you should be familiar with:
- FANET Fundamentals: Understanding FANET architecture, communication types, and 3D topology challenges provides essential context for gateway selection requirements
- UAV Networks: Fundamentals and Topologies: Knowledge of UAV network topologies and mobility patterns helps understand why gateway selection is critical for ground station connectivity
- Multi-Hop Fundamentals: Understanding relay strategies and multi-hop communication explains how non-gateway UAVs reach the ground control station through gateway nodes
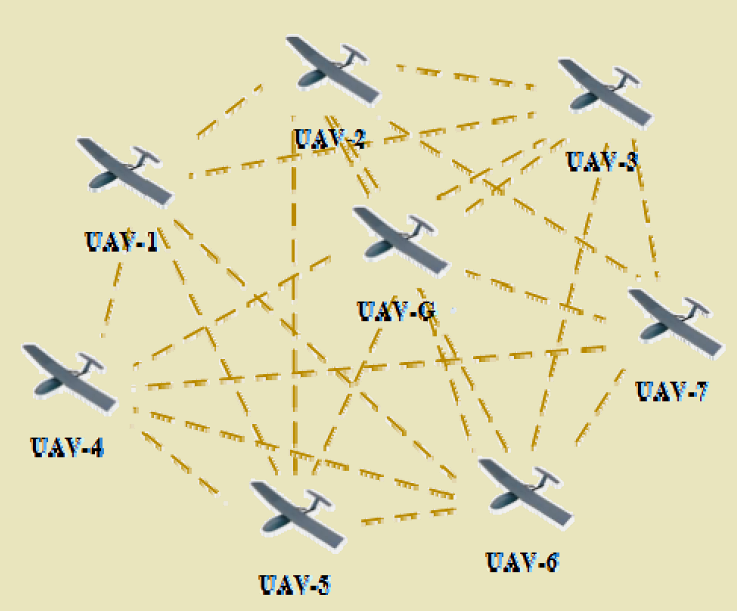
452.3 Gateway Selection in FANETs
To reduce interference and energy consumption, only selected UAVs act as gateways to the ground control station.
TipFor Beginners: Why Gateway Selection Matters
Imagine 20 drones all trying to talk to one ground control station simultaneously. That’s like 20 people shouting at one person—chaos, interference, and wasted energy.
Gateway solution: Instead of everyone talking to ground control, pick 3-4 “spokesperson” drones (gateways). Other drones send data to their nearest gateway, which relays everything to ground control.
Benefits: - Less interference (fewer radios transmitting to ground) - Energy savings (non-gateway drones use short-range links) - Better reliability (gateways optimized for ground communication)
Selection criteria: - Link quality: Can this drone reach ground control reliably? - Energy level: Does it have enough battery for the extra relay work? - Position: Is it centrally located so others can reach it easily?
Think of it like organizing a group project: you pick one person per sub-team to present to the teacher, rather than everyone talking at once.
452.3.1 Gateway Selection Algorithm
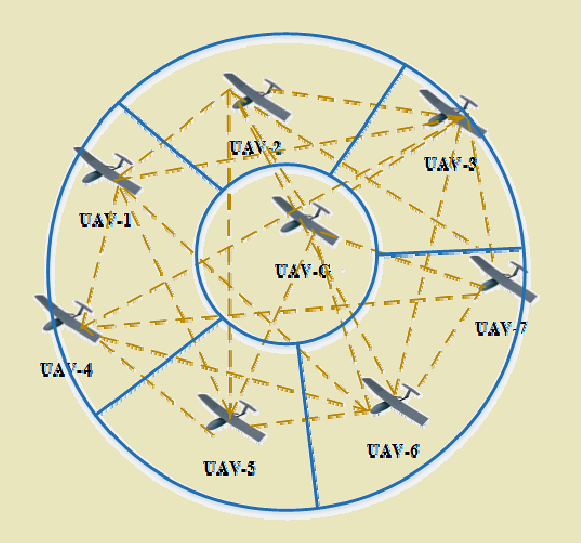

Objective: Minimize number of gateways while ensuring all UAVs can reach GCS within acceptable delay.
Approach: 1. Divide network coverage area into sub-areas 2. Select most stable UAV in each sub-area as gateway 3. Optimize sub-area boundaries dynamically 4. Each UAV maintains 2-hop neighborhood info
452.4 Stability Score Formula
Selection Criteria:
1. Stability Score:
Stability = α × LinkQuality + β × EnergyLevel + γ × CentralityWhere: - LinkQuality: Average link quality to GCS and neighbors - EnergyLevel: Remaining battery percentage - Centrality: Position centrality in sub-area - α, β, γ: Weighting factors (typically α=0.4, β=0.3, γ=0.3)
2. Connectivity Requirements: - Must maintain link to GCS - Must reach all UAVs in sub-area within 2 hops
3. Load Balancing: - Distribute traffic among gateways - Avoid overloading single gateway
NoteWorked Example: FANET Gateway Selection with Stability Scoring
Scenario: A FANET of 12 UAVs is monitoring a 3 km × 3 km wildfire perimeter. You need to select gateway UAVs that relay data to the ground control station (GCS) while minimizing interference and ensuring all UAVs can reach a gateway within 2 hops.
Given: - 12 UAVs divided into 3 sub-areas (4 UAVs each) - Stability score formula: S = 0.4 × LinkQuality + 0.3 × EnergyLevel + 0.3 × Centrality - UAV data for Sub-Area A: - UAV-1: LinkQuality=0.95, Energy=0.60, Centrality=0.70 - UAV-2: LinkQuality=0.80, Energy=0.85, Centrality=0.90 - UAV-3: LinkQuality=0.70, Energy=0.95, Centrality=0.50 - UAV-4: LinkQuality=0.85, Energy=0.75, Centrality=0.80 - UAV-to-UAV communication range: 800 m - UAV-to-GCS communication range: 2 km
Steps: 1. Calculate stability scores: - UAV-1: S = 0.4(0.95) + 0.3(0.60) + 0.3(0.70) = 0.38 + 0.18 + 0.21 = 0.77 - UAV-2: S = 0.4(0.80) + 0.3(0.85) + 0.3(0.90) = 0.32 + 0.255 + 0.27 = 0.845 - UAV-3: S = 0.4(0.70) + 0.3(0.95) + 0.3(0.50) = 0.28 + 0.285 + 0.15 = 0.715 - UAV-4: S = 0.4(0.85) + 0.3(0.75) + 0.3(0.80) = 0.34 + 0.225 + 0.24 = 0.805 2. Rank UAVs by stability: UAV-2 (0.845) > UAV-4 (0.805) > UAV-1 (0.77) > UAV-3 (0.715) 3. Verify gateway connectivity: UAV-2 is centrally located (0.90 centrality), ensuring all 4 UAVs are within 2 hops 4. Verify GCS link: UAV-2 is within 2 km of GCS (link quality 0.80 confirms good connection) 5. Select gateway: UAV-2 selected as Sub-Area A gateway
Result: UAV-2 becomes the gateway for Sub-Area A despite not having the best link quality (0.80 vs UAV-1’s 0.95), because its high centrality (0.90) and energy (0.85) provide better overall network stability. With 3 gateways (one per sub-area), the FANET reduces GCS communication load from 12 direct links to just 3 gateway links.
Key Insight: Gateway selection balances multiple factors. A UAV with excellent GCS link quality but low battery or poor position would fail quickly or leave neighbors stranded. The weighted stability score ensures gateways are reliable, well-positioned, and have energy reserves for the relay burden.
452.5 Dynamic Gateway Reselection
Gateway selection is not static—conditions change as UAVs move and batteries deplete.
452.5.1 Reselection Triggers
%% fig-alt: "Gateway reselection triggers and process: Five trigger conditions (battery below 20%, UAV leaves sub-area, link quality drops below threshold, load imbalance detected, periodic timer expires) lead to reselection process (recalculate stability scores, compare with current gateway, handover if new gateway scores higher), with handover procedure showing graceful transition to prevent packet loss"
%%{init: {'theme': 'base', 'themeVariables': {'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#E67E22', 'secondaryColor': '#ECF0F1', 'tertiaryColor': '#fff', 'nodeTextColor': '#2C3E50'}}}%%
flowchart TB
subgraph Triggers["Reselection Triggers"]
T1["Battery < 20%"]
T2["UAV Leaves Sub-Area"]
T3["Link Quality < Threshold"]
T4["Load Imbalance"]
T5["Periodic Timer"]
end
subgraph Process["Reselection Process"]
Recalc["Recalculate All<br/>Stability Scores"]
Compare["Compare with<br/>Current Gateway"]
Decision{"New Gateway<br/>Scores Higher?"}
Handover["Initiate<br/>Handover"]
Keep["Keep Current<br/>Gateway"]
end
subgraph Handover_Proc["Handover Procedure"]
Announce["Announce New Gateway"]
Transfer["Transfer Routing State"]
Update["Update Neighbor Tables"]
Complete["Handover Complete"]
end
T1 --> Recalc
T2 --> Recalc
T3 --> Recalc
T4 --> Recalc
T5 --> Recalc
Recalc --> Compare
Compare --> Decision
Decision -->|Yes| Handover
Decision -->|No| Keep
Handover --> Announce
Announce --> Transfer
Transfer --> Update
Update --> Complete
style T1 fill:#E67E22,stroke:#2C3E50,color:#fff
style Decision fill:#16A085,stroke:#2C3E50,color:#fff
style Complete fill:#2C3E50,stroke:#16A085,color:#fff
Trigger Conditions: 1. Energy threshold: Gateway battery drops below 20% 2. Mobility: Gateway UAV leaves its sub-area 3. Link degradation: GCS link quality falls below threshold 4. Load imbalance: Gateway handling disproportionate traffic 5. Periodic check: Scheduled reselection every 30-60 seconds
Hysteresis: To prevent oscillation, require new candidate to score 10-15% higher than current gateway before triggering handover.
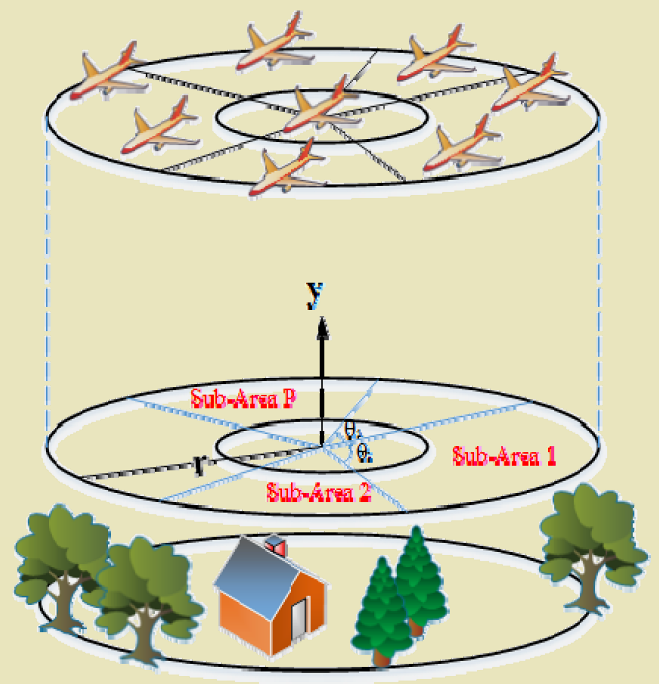
452.6 Sub-Area Partitioning Strategies
Effective gateway selection depends on how the FANET coverage area is divided.
452.6.1 K-Means Clustering Approach
%% fig-alt: "K-means clustering for FANET sub-area partitioning: Initialize k cluster centers randomly, assign each UAV to nearest center, recalculate centers as UAV position centroids, repeat until convergence, resulting in balanced sub-areas for gateway selection"
%%{init: {'theme': 'base', 'themeVariables': {'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#E67E22', 'secondaryColor': '#ECF0F1', 'tertiaryColor': '#fff', 'nodeTextColor': '#2C3E50'}}}%%
flowchart LR
subgraph Step1["Step 1: Initialize"]
Init["Place k random<br/>cluster centers"]
end
subgraph Step2["Step 2: Assign"]
Assign["Assign each UAV to<br/>nearest center"]
end
subgraph Step3["Step 3: Recalculate"]
Recalc["Move centers to<br/>UAV position centroids"]
end
subgraph Step4["Step 4: Converge"]
Check{"Centers<br/>moved?"}
Done["Partitioning<br/>Complete"]
end
Init --> Assign
Assign --> Recalc
Recalc --> Check
Check -->|Yes| Assign
Check -->|No| Done
style Init fill:#2C3E50,stroke:#16A085,color:#fff
style Done fill:#16A085,stroke:#2C3E50,color:#fff
Algorithm Steps: 1. Choose number of gateways k (based on network size, GCS capacity) 2. Initialize k cluster centers (random or evenly distributed) 3. Assign each UAV to nearest cluster center 4. Recalculate centers as centroid of assigned UAVs 5. Repeat steps 3-4 until convergence
3D Considerations: - Use 3D Euclidean distance: d = √((x₂-x₁)² + (y₂-y₁)² + (z₂-z₁)²) - Weight altitude differences (vertical links often weaker) - Consider layer boundaries (high/medium/low altitude)
452.7 Knowledge Check
Test your understanding of FANET gateway selection.
452.8 Summary
This chapter covered gateway selection algorithms for FANETs:
- Gateway Purpose: Selected UAVs relay data to ground control, reducing interference and distributing energy consumption across the network
- Stability Score Formula: Gateway selection uses weighted combination of link quality (α=0.4), energy level (β=0.3), and position centrality (γ=0.3)
- Selection Algorithm: Partition network into sub-areas, calculate stability scores for all UAVs, select highest-scoring UAV in each sub-area as gateway
- Connectivity Requirements: Gateways must maintain GCS link and enable all sub-area UAVs to reach them within 2 hops
- Dynamic Reselection: Triggers include battery depletion (<20%), mobility out of sub-area, link degradation, load imbalance, and periodic timers
- K-Means Partitioning: Clustering algorithm divides FANET into balanced sub-areas using 3D Euclidean distance, considering altitude differences and layer boundaries
452.9 What’s Next
The next chapter explores FANET-VANET Integration, covering how UAV networks integrate with vehicular networks for traffic monitoring, emergency response, coverage extension, and connectivity bridging in dual high-mobility environments.
NoteRelated Chapters
Foundation: - FANET Fundamentals - FANET architecture and routing - UAV Fundamentals - UAV network basics
Related Architecture: - Multi-Hop Fundamentals - Relay strategies - Clustering Protocols - Cluster head selection in WSNs
Networking: - Routing - Multi-hop routing protocols