%% fig-alt: "FANET three-dimensional architecture with three altitude layers: High layer at 200-500m with 2 relay UAVs communicating intra-layer and to ground control station; Medium layer at 100-200m with 3 surveillance UAVs communicating intra-layer; Low layer at 50-100m with 2 data collection UAVs gathering from ground sensors; Inter-layer vertical links connect layers enabling 3D mesh topology with very fast topology changes due to UAV mobility"
%%{init: {'theme': 'base', 'themeVariables': {'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#E67E22', 'secondaryColor': '#ECF0F1', 'tertiaryColor': '#fff', 'nodeTextColor': '#2C3E50'}}}%%
graph TB
subgraph "FANET Architecture (3D Topology)"
subgraph "High Altitude Layer (200-500m)"
UAV1["UAV 1<br/>(Relay)"]
UAV2["UAV 2<br/>(Relay)"]
UAV1 <-.->|Intra-Layer| UAV2
end
subgraph "Medium Altitude Layer (100-200m)"
UAV3["UAV 3<br/>(Surveillance)"]
UAV4["UAV 4<br/>(Surveillance)"]
UAV5["UAV 5<br/>(Surveillance)"]
UAV3 <-.->|Intra-Layer| UAV4
UAV4 <-.->|Intra-Layer| UAV5
end
subgraph "Low Altitude Layer (50-100m)"
UAV6["UAV 6<br/>(Data Collection)"]
UAV7["UAV 7<br/>(Data Collection)"]
end
UAV1 <-->|Inter-Layer| UAV3
UAV2 <-->|Inter-Layer| UAV4
UAV3 <-->|Inter-Layer| UAV6
UAV5 <-->|Inter-Layer| UAV7
GCS["Ground Control<br/>Station"]
UAV1 -.->|Air-to-Ground| GCS
UAV2 -.->|Air-to-Ground| GCS
WSN["Ground Sensors<br/>(WSN)"]
UAV6 -.->|Data Collection| WSN
UAV7 -.->|Data Collection| WSN
end
style UAV1 fill:#2C3E50,stroke:#16A085,color:#fff
style UAV3 fill:#E67E22,stroke:#2C3E50,color:#fff
style UAV6 fill:#16A085,stroke:#2C3E50,color:#fff
style GCS fill:#2C3E50,stroke:#16A085,color:#fff
451 FANET: Flying Ad Hoc Network Fundamentals
451.1 Learning Objectives
By the end of this chapter, you will be able to:
- Understand FANET Architecture: Explain Flying Ad Hoc Networks and UAV-to-UAV communication
- Compare Network Types: Differentiate FANETs from MANETs and VANETs based on mobility and topology
- Design 3D Topologies: Plan aerial network formations accounting for three-dimensional space
- Handle High Mobility: Select routing protocols suitable for very fast topology changes
451.2 Prerequisites
Before diving into this chapter, you should be familiar with:
- UAV Networks: Fundamentals and Topologies: Understanding UAV network types, basic topologies (star, mesh), and three-dimensional mobility challenges provides the foundation for advanced FANET architectures and coordination
- Multi-Hop Fundamentals: Knowledge of multi-hop routing protocols and relay strategies is essential for designing FANETs where UAVs communicate through intermediary nodes across dynamic 3D topologies
- Wireless Sensor Networks: Familiarity with WSN architectures and data collection strategies helps understand FANET-WSN integration where UAVs serve as mobile data collectors for ground sensor networks
- Networking Basics: Core networking concepts including ad hoc networks, routing protocols, and topology management provide context for FANET-specific challenges and solutions
451.3 Flying Ad Hoc Networks (FANETs)
TipFor Beginners: Flying Networks (FANETs)
Drones don’t just fly alone—they can form flying networks, communicating with each other mid-air to coordinate missions. This is called a FANET (Flying Ad Hoc Network).
What’s an ad hoc network? No fixed infrastructure (like cell towers)—devices dynamically connect to whoever’s nearby. Like a group of hikers with walkie-talkies forming a temporary network as they move through mountains.
FANET vs other networks:
- MANET (Mobile Ad Hoc Network): People with smartphones walking around campus
- VANET (Vehicular Ad Hoc Network): Cars communicating on highways
- FANET (Flying Ad Hoc Network): Drones communicating in 3D airspace
Key difference: FANETs move in 3D space at high speeds with rapidly changing topology. A drone swarm searching for wildfire survivors needs to constantly reconfigure who talks to who as drones move.
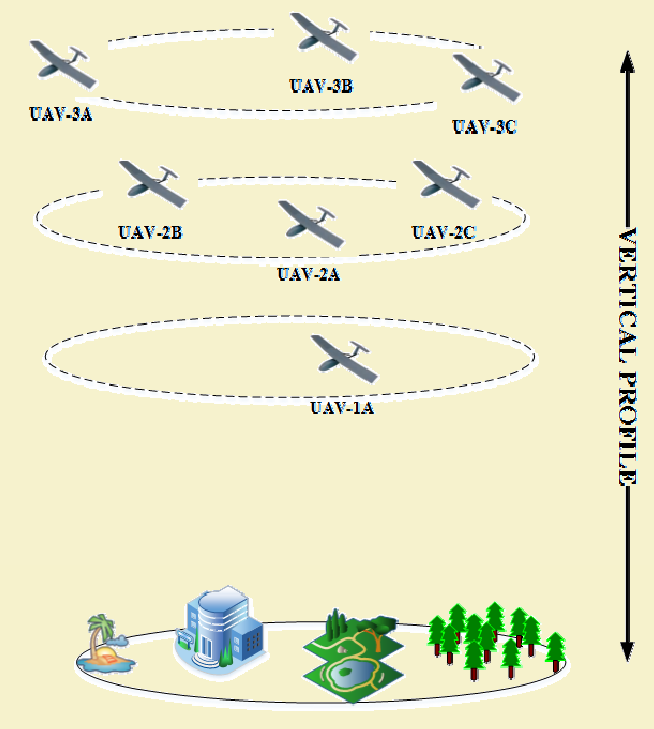
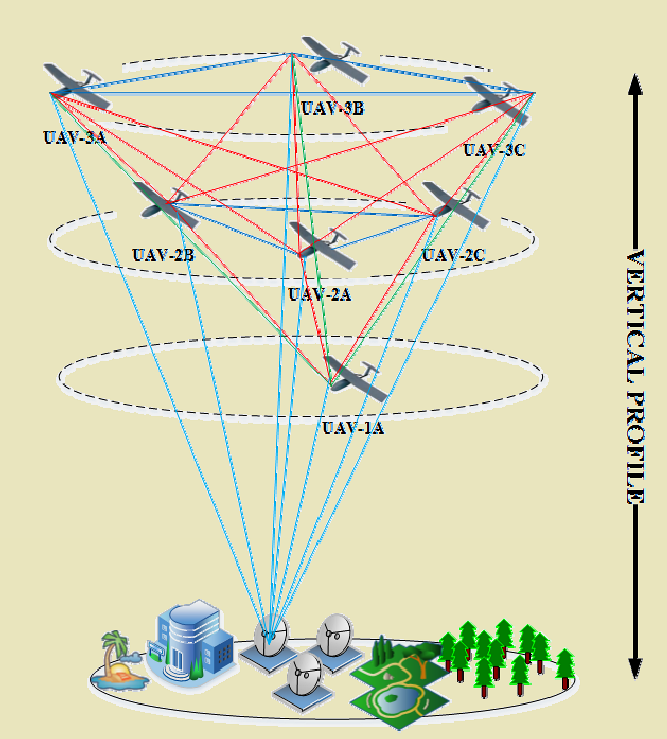
Three communication types:
- UAV-to-UAV: Drones talking to each other (coordinate search patterns)
- UAV-to-Ground: Drones talking to ground control or ground sensors (download collected data)
- UAV-to-Satellite: Long-range communication for remote operations
| Term | Simple Explanation |
|---|---|
| FANET | Flying Ad Hoc Network—drones forming temporary wireless networks |
| 3D Topology | Network connections in three-dimensional space (not just ground-level like cars/phones) |
| High Mobility | Drones move fast (10-30 m/s), connections break/reform constantly |
| Intra-Layer | Communication between drones at same altitude (horizontal links) |
| Inter-Layer | Communication between drones at different altitudes (vertical links) |
| Data Mule | Drone that collects data by flying close to ground sensors, then uploads to base |
Real example: Amazon testing drone delivery. 50 drones operate in same airspace. They form FANET to: - Coordinate flight paths (avoid collisions) - Share weather sensor data (wind, rain) - Relay messages to distribution center - Reroute around obstacles discovered by other drones
Challenge: Traditional network protocols assume slow-moving nodes. FANETs need protocols that handle very fast topology changes—if Drone A is talking to Drone B, but B flies away, A must quickly find new relay (C or D) within seconds.
Integration with ground networks: Drone swarm collects data from isolated ground sensors (like farms, forests), then uploads bulk data when returning to base. Acts as mobile gateway for sensors that can’t reach fixed infrastructure.
Why 3D matters: Altitude adds complexity. Two drones 100m apart horizontally but at different altitudes (one at 50m, one at 200m) might have 223m separation (use Pythagorean theorem: √(100² + 150²)). This affects communication range and routing decisions.
451.4 FANET Architecture and Communication
FANETs are mobile ad hoc networks formed by UAVs, characterized by high mobility, 3D topology, and dynamic membership.



451.4.1 FANET Characteristics vs MANETs/VANETs
| Characteristic | MANET | VANET | FANET |
|---|---|---|---|
| Mobility | Low-Medium | Medium | Very High |
| Speed | 0-5 m/s | 10-30 m/s | 10-30 m/s |
| Topology Dimension | 2D | 2D | 3D |
| Node Density | High | Variable | Low |
| Topology Change | Slow | Fast | Very Fast |
| Path Predictability | Low | High (roads) | Medium (missions) |
| Energy Constraint | Moderate | Low (vehicles) | Very High (battery) |
| Communication Range | 100-300m | 300-500m | 1-5 km |
%% fig-alt: "Comparison quadrant diagram showing FANET, MANET, and VANET differences across mobility speed and topology dimension axes: MANET at low speed 0-5 m/s and 2D (pedestrians on campus), VANET at medium speed 10-30 m/s and 2D (vehicles on roads), FANET at high speed 10-30 m/s and 3D (drones in airspace) with unique challenges highlighted."
%%{init: {'theme': 'base', 'themeVariables': { 'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#16A085', 'secondaryColor': '#E67E22', 'tertiaryColor': '#7F8C8D', 'fontSize': '12px'}}}%%
graph TB
subgraph COMPARISON["Ad Hoc Network Comparison"]
direction TB
subgraph MANET_BOX["MANET: Mobile Ad Hoc"]
MANET_DESC["• People with smartphones<br/>• Campus/conference<br/>• Speed: 0-5 m/s<br/>• 2D movement<br/>• High density<br/>• Slow topology change"]
MANET_ICON["Walking figure"]
end
subgraph VANET_BOX["VANET: Vehicular Ad Hoc"]
VANET_DESC["• Cars on highways<br/>• Traffic coordination<br/>• Speed: 10-30 m/s<br/>• 2D movement (roads)<br/>• Predictable paths<br/>• Medium topology change"]
VANET_ICON["Car figure"]
end
subgraph FANET_BOX["FANET: Flying Ad Hoc"]
FANET_DESC["• Drones in airspace<br/>• Swarm missions<br/>• Speed: 10-30 m/s<br/>• 3D movement<br/>• Low density<br/>• VERY FAST topology change"]
FANET_ICON["Drone figure"]
end
end
UNIQUE["FANET Unique Challenges:<br/>━━━━━━━━━━━━━━━<br/>• 3D routing (altitude matters)<br/>• Severe energy constraints<br/>• Air-to-ground links<br/>• Mission coordination<br/>• Collision avoidance<br/>• GPS-based positioning"]
MANET_BOX --> VANET_BOX
VANET_BOX --> FANET_BOX
FANET_BOX --> UNIQUE
style MANET_BOX fill:#16A085,stroke:#2C3E50,color:#fff
style VANET_BOX fill:#E67E22,stroke:#2C3E50,color:#fff
style FANET_BOX fill:#2C3E50,stroke:#16A085,color:#fff
style UNIQUE fill:#7F8C8D,stroke:#2C3E50,color:#fff
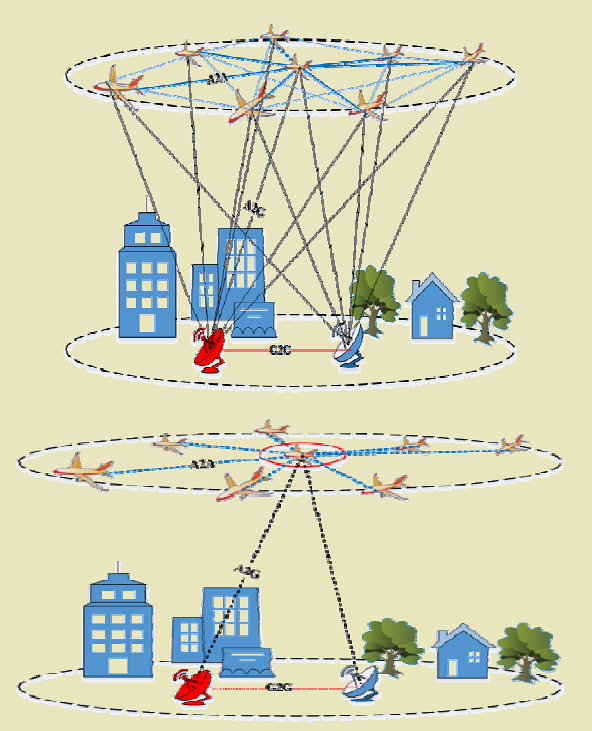
451.4.2 FANET Communication Types
1. Intra-Plane (Intra-Layer) Communication - UAVs at same altitude communicate peer-to-peer - Short distance, high reliability - Cluster coordination
2. Inter-Plane (Inter-Layer) Communication - Communication between UAVs at different altitudes - Relay for extended range - Hierarchical coordination
3. FANET-Ground Station Communication - Command and control from GCS - Mission updates, telemetry upload - Critical for safety
4. FANET-WSN Communication - Data collection from ground sensors - UAV acts as mobile sink - Extends WSN coverage
5. FANET-VANET Communication - V2X (Vehicle-to-Everything) support - Traffic monitoring and guidance - Emergency message relay
NoteWorked Example: Air-to-Air Link Budget for High-Speed FANET
Scenario: Two UAVs in a FANET swarm need to maintain a reliable 10 Mbps data link while flying at 25 m/s in opposite directions (closing velocity = 50 m/s). You need to determine the maximum separation distance that supports this data rate.
Given: - Frequency: 5.8 GHz (802.11a/n) - Transmit power: 20 dBm (100 mW) - Antenna gain: 5 dBi (omnidirectional) - Receiver sensitivity for 10 Mbps: -78 dBm - Required fade margin: 10 dB (for multipath, interference) - UAV altitude: Both at 150 m - Closing velocity: 50 m/s
Steps: 1. Calculate link budget: - Available path loss = Tx power + Tx antenna gain + Rx antenna gain - Rx sensitivity - Fade margin - Available path loss = 20 + 5 + 5 - (-78) - 10 = 98 dB 2. Apply free-space path loss formula: FSPL (dB) = 20×log₁₀(d) + 20×log₁₀(f) + 20×log₁₀(4π/c) - At 5.8 GHz: FSPL = 20×log₁₀(d) + 55.75 dB 3. Solve for maximum distance: 98 = 20×log₁₀(d) + 55.75 - 20×log₁₀(d) = 42.25 - d = 10^(42.25/20) = 10^2.1125 = 129.5 m → use 120 m with safety margin 4. Calculate Doppler shift: f_doppler = f × v/c = 5.8 GHz × 50 m/s / 3×10⁸ = 967 Hz - 802.11 subcarrier spacing: 312.5 kHz >> 967 Hz. Doppler within tolerance 5. Calculate link duration at maximum range: Starting from 120 m apart, approaching at 50 m/s: Time to pass = minimal (they’re flying toward each other). But if maintaining formation at 120 m: Link stable as long as formation holds 6. Verify for diverging case: If flying apart at 50 m/s from 50 m initial separation: Time to 120 m limit = (120 - 50) / 50 = 1.4 seconds before link degrades below 10 Mbps
Result: The air-to-air link supports 10 Mbps at up to 120 m separation. At 5.8 GHz with omnidirectional antennas, Doppler shift from 50 m/s relative motion is negligible. However, the short 1.4-second link duration when UAVs diverge requires proactive handoff to maintain connectivity in dynamic FANET topologies.
Key Insight: FANET air-to-air links benefit from line-of-sight propagation but suffer from limited range due to omnidirectional antennas and regulatory power limits. The critical challenge is not Doppler (which is manageable at UAV speeds) but the short link duration when high-speed UAVs pass each other. Design for 2-3x margin on separation distance to allow time for routing protocol adaptation before links break.
451.5 FANET Routing Protocols
FANET routing must handle 3D mobility, rapid topology changes, and energy constraints.
%% fig-alt: "FANET routing protocol taxonomy: Four main types - Proactive table-driven (DSDV, OLSR with high overhead challenge from frequent updates), Reactive on-demand (AODV, DSR with discovery delay challenge), Position-based geographic (GPSR, Greedy Forwarding, Predictive routing marked as best for FANET using GPS without route discovery), Hybrid approaches (Zone-based, Cluster hierarchical, Bio-inspired combining benefits); Design constraints shown affecting all: energy limited batteries, 3D space complexity, very high mobility 10-30 m/s, low node density, link quality variations"
%%{init: {'theme': 'base', 'themeVariables': {'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#E67E22', 'secondaryColor': '#ECF0F1', 'tertiaryColor': '#fff', 'nodeTextColor': '#2C3E50'}}}%%
graph TB
subgraph "FANET Routing Protocol Types"
Routing["FANET Routing<br/>Challenges"]
Proactive["Proactive<br/>(Table-Driven)"]
Reactive["Reactive<br/>(On-Demand)"]
Position["Position-Based<br/>(Geographic)"]
Hybrid["Hybrid<br/>Approaches"]
ProEx["Examples:<br/>• DSDV (adapted)<br/>• OLSR (optimized)"]
ReacEx["Examples:<br/>• AODV (adapted)<br/>• DSR (modified)"]
PosEx["Examples:<br/>• GPSR<br/>• Greedy Forwarding<br/>• Predictive Routing"]
HybEx["Examples:<br/>• Zone-Based<br/>• Cluster Hierarchical<br/>• Bio-Inspired"]
ProChal["Challenge:<br/>High overhead<br/>due to frequent<br/>topology updates"]
ReacChal["Challenge:<br/>Route discovery<br/>delay in fast-<br/>changing topology"]
PosBest["Best for FANET:<br/>Uses GPS position,<br/>no route discovery,<br/>adapts to mobility"]
HybBest["Combines benefits:<br/>Stable clusters +<br/>adaptive routing"]
Constraints["Design Constraints:<br/>• Energy limited (battery)<br/>• 3D space complexity<br/>• Very high mobility (10-30 m/s)<br/>• Low node density<br/>• Link quality variations"]
end
Routing --> Proactive
Routing --> Reactive
Routing --> Position
Routing --> Hybrid
Proactive --> ProEx
Reactive --> ReacEx
Position --> PosEx
Hybrid --> HybEx
ProEx --> ProChal
ReacEx --> ReacChal
PosEx --> PosBest
HybEx --> HybBest
Constraints -.->|Impacts| Routing
style Routing fill:#2C3E50,stroke:#16A085,color:#fff
style Position fill:#16A085,stroke:#2C3E50,color:#fff
style PosBest fill:#E67E22,stroke:#2C3E50,color:#fff
style Constraints fill:#7F8C8D,stroke:#2C3E50,color:#fff
WarningCommon Misconception: “FANETs Can Use Standard MANET Protocols”
Misconception: Since FANETs are just flying ad hoc networks, existing MANET protocols like AODV or DSDV should work fine with minor tweaks.
Reality: FANET mobility characteristics fundamentally break traditional MANET protocol assumptions, requiring completely different approaches.
Quantified Example - Route Lifetime Comparison:
MANET (Ground-based ad hoc network): - Node speed: 1-5 m/s (walking/slow vehicles) - Communication range: 250m - Route lifetime: 50-250 seconds (250m ÷ 5 m/s) - AODV route discovery: 2-5 seconds - Usable route time: 45-245 seconds (plenty of time to use discovered route)
FANET (UAV ad hoc network): - UAV speed: 15 m/s (typical) - Communication range: 1000m (better air propagation) - Route lifetime: 67 seconds (1000m ÷ 15 m/s) - AODV route discovery: 5-10 seconds (longer due to lower node density) - Usable route time: 57-62 seconds (route obsolete quickly)
At 25 m/s (aggressive flight): - Route lifetime: 40 seconds - Route discovery: 8-12 seconds - Usable route time: 28-32 seconds (barely usable!)
Why Traditional Protocols Fail:
Control Overhead Explosion: In MANET with 10 nodes moving slowly, topology changes every ~100s. Protocol sends ~5 control packets/node/minute. In FANET with same 10 nodes at 20 m/s, topology changes every ~30s. Control overhead increases 3-5×, often exceeding data traffic (measured: 70% control overhead in FANET vs 15% in MANET).
Route Discovery Futility: By the time AODV discovers multi-hop route (5-10 seconds), intermediate UAVs have moved significantly. Example: 3-hop route discovered in 8 seconds. At 15 m/s, each UAV moved 120m. Original route geometry no longer exists—packets reach dead zones.
Energy Waste: Proactive protocols (DSDV, OLSR) maintain routing tables for all destinations. In FANET, tables must update every 2-5 seconds to stay valid. This continuous control message flooding drains battery 3-4× faster than position-based routing.
FANET-Specific Solutions Required:
Position-Based Routing (GPSR, Greedy Forwarding): Use GPS coordinates, forward to geographic neighbor closest to destination. No route discovery. Adapts instantly to topology changes. Control overhead: <10%.
Predictive Routing: UAVs share flight plans. Protocol predicts future positions, establishes routes proactively to where UAVs will be, not where they are. Reduces link breaks by 40-60%.
Store-Carry-Forward: When no forwarding neighbor exists, buffer packets, carry while flying, forward when connectivity improves. Essential for sparse FANETs.
Bottom Line: MANET protocols assume topology changes slowly enough for route establishment to be worthwhile. FANETs change so fast that discovering routes is often futile—you need geographic/predictive approaches that work without explicit route discovery.
451.6 Knowledge Check
Test your understanding of FANET fundamentals.
451.7 Summary
This chapter covered the fundamentals of Flying Ad Hoc Networks (FANETs):
- FANET Definition: Flying ad hoc networks are mobile ad hoc networks formed by UAVs, characterized by 3D topology, very high mobility (10-30 m/s), and dynamic membership
- Comparison with MANETs/VANETs: FANETs differ from ground-based networks in topology dimension (3D vs 2D), node density (low), energy constraints (very high), and topology change rate (very fast)
- Communication Types: FANETs support five communication types: intra-plane (same altitude), inter-plane (different altitudes), ground station, WSN, and VANET integration
- Routing Challenges: Traditional MANET protocols fail in FANETs due to high control overhead, route discovery delays, and energy waste from frequent updates
- Position-Based Routing: GPSR and greedy forwarding use GPS coordinates for next-hop decisions without explicit route discovery, adapting instantly to topology changes
- Store-Carry-Forward: Essential technique for sparse FANETs where UAVs buffer packets during connectivity gaps and forward when links become available
451.8 What’s Next
The next chapter explores FANET Gateway Selection, covering algorithms for selecting optimal gateway UAVs, stability scoring formulas, and techniques for minimizing ground station interference while ensuring network connectivity.
NoteRelated Chapters
Foundation: - UAV Fundamentals - UAV network basics and topologies - UAV Production Review - Implementation and deployment
Related Architecture: - Ad-hoc Networks - MANET fundamentals - WSN Overview - Ground sensor integration - Multi-Hop Fundamentals - Relay and routing
Networking: - Routing - Position-based routing - Mobile Wireless - Wireless communication