Identify Core Capabilities: Describe the key features of UAV networks including flexible topology, wide coverage, and rapid deployment
Understand Energy Constraints: Calculate battery endurance and payload trade-offs for UAV missions
Analyze Environmental Effects: Explain how wind, weather, and temperature affect UAV network operations
Apply Communication Range Planning: Calculate coverage radius and link budget for aerial base stations
Recognize Misconceptions: Identify and correct common misunderstandings about UAV capabilities
446.2 Prerequisites
Before diving into this chapter, you should be familiar with:
UAV Introduction: Understanding basic UAV network concepts, FANET definition, and UAV roles in IoT
Networking Basics: Fundamental networking concepts including wireless communication principles
446.3 UAV Network Features
Time: ~12 min | Intermediate | P05.C22.U02
Figure 446.1: Key considerations in UAV networks - mobility, energy, connectivity, and payload management
FANET architecture from CP IoT System Design Guide
Figure 446.2: Flying Ad-hoc Network (FANET) architecture showing UAVs forming a self-organizing mesh network with ground control station connectivity
Comparison of FANET and VANET architectures
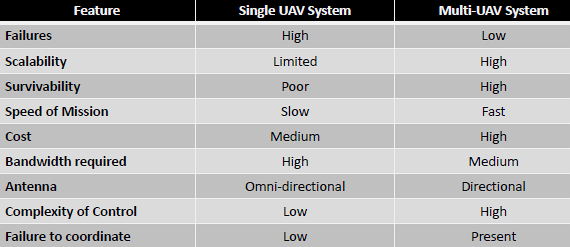
Figure 446.3: FANET vs VANET comparison: Flying networks have 3D mobility with faster topology changes, while vehicular networks operate on 2D road constraints
446.3.1 Core Capabilities
1. Flexible Topology - Mesh or star network configurations - Dynamic reconfiguration during flight - Adaptive to mission requirements
2. Wide Coverage - Large area coverage from altitude - Line-of-sight propagation advantages - Extended communication range
3. Multi-Tasking - Simultaneous sensing, communication, and relay - Swarm intelligence for coordinated tasks - Diverse payload support (cameras, sensors, packages)
4. Rapid Deployment - Quick setup without infrastructure - Ideal for emergency and temporary scenarios - Reconfigurable for varying missions
5. SDN-Enabled - Software-Defined Networking for flexible management - Centralized control with distributed execution - Dynamic service provisioning
Understanding UAV network topologies is essential for designing effective aerial IoT systems.
UAV Network Topology
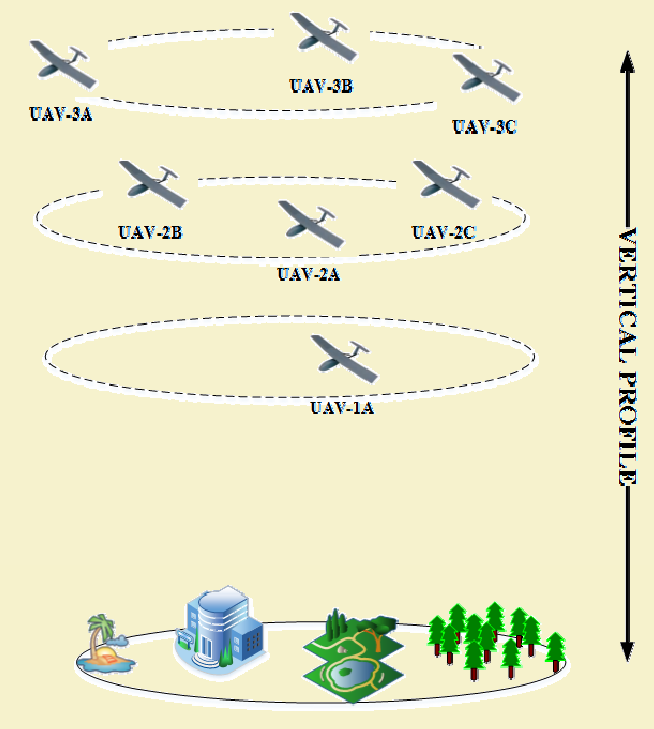
Figure 446.4: UAV network topology showing various formation patterns and communication links between aerial nodes and ground infrastructure.
UAV Topology Comparison
Figure 446.5: Comparison of UAV network topologies showing star, mesh, and hierarchical configurations with their respective advantages and trade-offs.
446.3.3 UAV Communication Systems
UAV networks rely on multiple communication links for coordination and data transfer.
UAV Communication Link
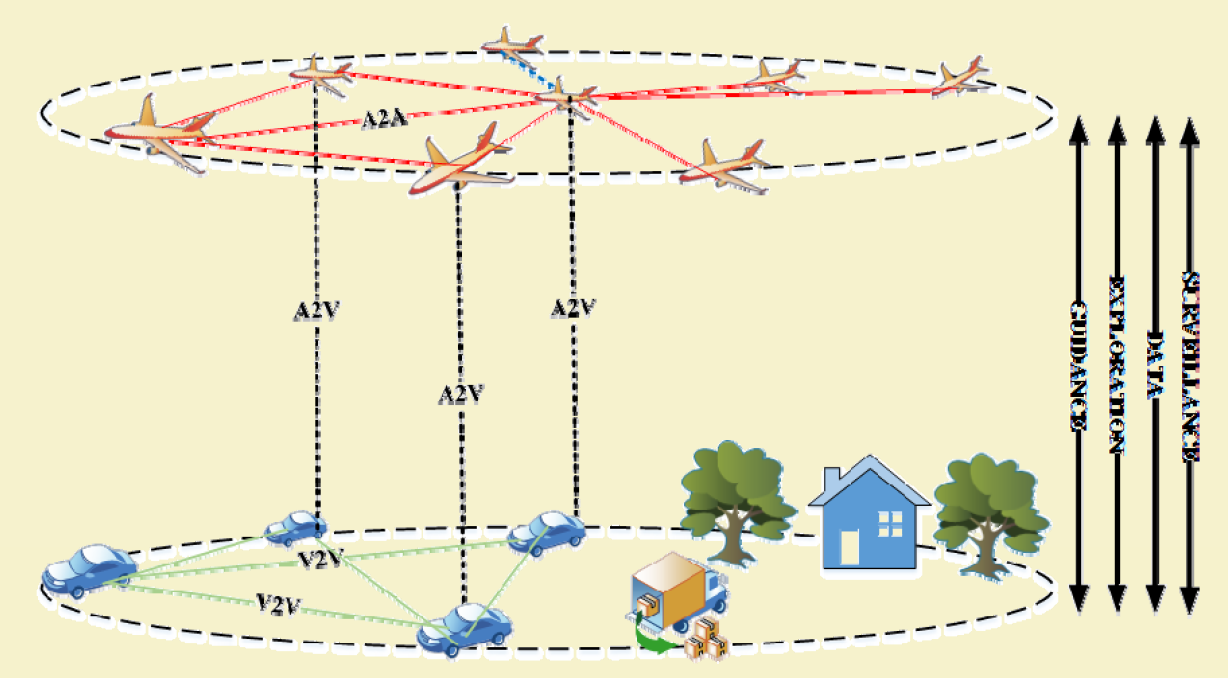
Figure 446.6: UAV communication link architecture illustrating air-to-air, air-to-ground, and satellite backhaul connectivity options.
UAV Ground Control
Figure 446.7: UAV ground control system architecture showing command/control links and telemetry data flows.
Show code
InlineKnowledgeCheck_kc_uav_features_1 = ({question:"A wildfire monitoring team deploys a FANET (Flying Ad-hoc Network) of 6 UAVs to track fire spread across a 20 km squared forest. Three UAVs have thermal cameras (data producers), and three act as relay nodes. After 45 minutes, the FANET loses connectivity when Relay-UAV-2 experiences GPS failure and drifts 3 km off course. What FANET characteristic would have prevented this network partition?",options: ["Implementing Software-Defined Networking (SDN) for centralized path recalculation","Using mesh topology with multi-hop routing instead of relying on fixed relay positions","Increasing UAV altitude to extend line-of-sight communication range","Deploying solar panels on relay UAVs to eliminate battery constraints" ],correctAnswer:1,feedback: {correct:"Absolutely correct! Mesh topology with multi-hop routing is the key FANET resilience feature. In mesh topology, every UAV can communicate with multiple neighbors. If Relay-UAV-2 drifts away, data can route through Relay-UAV-1 and Relay-UAV-3 instead. FANETs use position-based routing that automatically recalculates paths based on UAV coordinates. When Relay-UAV-2's GPS fails, adjacent UAVs detect its position drift and exclude it from routing tables.",incorrect: ["While SDN enables centralized control and dynamic path recalculation, it doesn't solve the fundamental topology problem. The SDN controller needs to communicate with all UAVs to recalculate paths. If Relay-UAV-2 was the only link between camera UAVs and the controller, the controller can't reach those UAVs.","Increasing altitude does extend line-of-sight communication range, but doesn't address relay node failure. Regulatory limits restrict UAV altitude to 120 m for civilian operations. Higher altitudes also have stronger winds, causing faster battery drain and position instability.","Solar panels would extend flight endurance, but have zero impact on GPS failure and position drift. Solar panels don't fix navigation systems. The scenario explicitly states Relay-UAV-2 drifted due to GPS failure, not battery depletion." ] },difficulty:"hard",learningObjective:"Understand FANET resilience characteristics and topology advantages for network reliability"})
446.4 Key Challenges
446.4.1 3D Mobility and Topology Changes
%%{init: {'theme': 'base', 'themeVariables': { 'primaryColor': '#2C3E50', 'primaryTextColor': '#fff', 'primaryBorderColor': '#16A085', 'lineColor': '#16A085', 'secondaryColor': '#E67E22', 'tertiaryColor': '#7F8C8D'}}}%%
mindmap
root((UAV Network<br/>Challenges))
Mobility
3D movement
High speed 10-30 m/s
Rapidly changing topology
Doppler effects
Energy
Limited battery 15-45 min
Trade-off payload vs endurance
Recharge planning
Solar augmentation
Communication
Intermittent links
Distance attenuation
Line-of-sight needed
Interference
Coordination
Swarm management
Collision avoidance
Task allocation
Distributed decision
Figure 446.8: UAV network challenges mindmap showing four main categories: Mobility, Energy, Communication, and Coordination with their specific challenges {fig-alt=“Mindmap with UAV Network Challenges at center branching into four categories: Mobility (3D movement, high speed 10-30 m/s, rapidly changing topology, Doppler effects), Energy (limited battery 15-45 min, payload vs endurance trade-off, recharge planning, solar augmentation), Communication (intermittent links, distance attenuation, line-of-sight needed, interference), and Coordination (swarm management, collision avoidance, task allocation, distributed decision-making)”}
Figure 446.9: 2D vs 3D Mobility Comparison: Ground vehicles move in 2D with road constraints enabling predictable paths. UAVs move freely in 3D space at variable speeds, causing rapid neighbor changes and requiring real-time routing. {fig-alt=“Comparison diagram showing Ground Networks (2D) with X-Y only movement at 0-30 m/s versus UAV Networks (3D) with X-Y-Z unconstrained movement at 10-50 m/s, highlighting design implications for routing, navigation, and battery limits”}
Frequently Changing Topology: - UAVs move at high speeds (10-30 m/s) - 3D mobility more complex than ground MANETs - Neighbor relationships change rapidly
Intermittent Links: - Link quality varies with distance and angle - Doppler shift at high velocities - Building/terrain obstructions
Energy Constraints: - Limited battery capacity (15-45 minutes typical flight time) - Trade-off between payload and endurance - Energy-aware routing critical
Environmental Effects: - Wind impacts stability and path - Weather affects operations - Temperature impacts battery performance
Figure 446.10: UAV Network Challenges diagram showing four major challenges and their impacts leading to common solutions. {fig-alt=“UAV Network Challenges diagram showing four major challenges: Frequently changing topology, Intermittent links, Energy constraints, and Environmental effects, with their impacts and solutions including position-based routing and energy-aware protocols”}
446.5 Worked Examples
NoteWorked Example: UAV Communication Range Planning
Scenario: You need to deploy a single UAV as a flying base station to provide emergency Wi-Fi coverage after a flood destroyed cell towers in a rural area. The UAV must cover a circular zone where 200 flood victims are sheltering.
Given: - UAV altitude: 120 m (regulatory maximum) - Wi-Fi radio power: 100 mW (20 dBm) - Receiver sensitivity: -80 dBm - Free-space path loss at 2.4 GHz - Required: Coverage radius on ground
Steps: 1. Calculate maximum path loss budget: 20 dBm - (-80 dBm) = 100 dB link budget 2. Apply free-space path loss formula: Path Loss (dB) = 20 x log10(d) + 20 x log10(f) + 20 x log10(4 pi/c), where for 2.4 GHz: Path Loss = 20 x log10(d) + 40.05 dB 3. Solve for distance: 100 dB = 20 x log10(d) + 40.05, so 20 x log10(d) = 59.95, d = 10^(59.95/20) = 994 m 4. Calculate ground coverage radius: Using Pythagorean theorem with 120m altitude: Ground radius = sqrt(994 squared - 120 squared) = sqrt(988036 - 14400) = sqrt(973636) = approximately 987 m 5. Calculate coverage area: pi x 987 squared = 3.06 km squared
Result: A single UAV at 120 m altitude provides approximately 1 km radius ground coverage (3 km squared area), sufficient for a typical emergency shelter zone.
Key Insight: Altitude creates a trade-off: higher altitude increases line-of-sight coverage area but reduces signal strength due to longer slant range. The 120 m regulatory limit often represents a good balance for emergency communications.
NoteWorked Example: Battery Endurance with Payload Trade-off
Scenario: A search and rescue team must decide between two UAV configurations for finding a missing hiker in mountainous terrain before nightfall (2 hours remaining).
Given: - UAV: 5000 mAh battery at 22.2V (111 Wh capacity) - Base power consumption (flight + avionics): 180 W - Configuration A: Thermal camera (15 W) + spotlight (25 W) = 40 W extra - Configuration B: Lightweight optical camera only (8 W extra) - Search area: 4 km squared - Survey speed: 8 m/s
Steps: 1. Calculate flight time for Configuration A: Total power = 180 + 40 = 220 W. Flight time = 111 Wh / 220 W = 0.505 hours (30.3 minutes) 2. Calculate flight time for Configuration B: Total power = 180 + 8 = 188 W. Flight time = 111 Wh / 188 W = 0.59 hours (35.4 minutes) 3. Calculate survey coverage per flight (100m swath width): Config A: 8 m/s x 30.3 min x 60 x 100 m = 1.45 km squared per flight. Config B: 8 m/s x 35.4 min x 60 x 100 m = 1.70 km squared per flight 4. Calculate flights needed for 4 km squared: Config A: 4 / 1.45 = 2.76 flights, so 3 flights. Config B: 4 / 1.70 = 2.35 flights, so 3 flights 5. Total mission time (including 15 min battery swaps): Config A: 3 x 30.3 + 2 x 15 = 121 minutes (2.0 hours). Config B: 3 x 35.4 + 2 x 15 = 136 minutes (2.3 hours)
Result: Configuration A (thermal + spotlight) barely fits within the 2-hour window and provides critical night vision capability. Configuration B exceeds the deadline but offers no advantage in fading daylight conditions.
Key Insight: Payload selection dramatically affects mission feasibility. Adding 32 W of sensors reduced flight time by 15% but provided essential thermal imaging for finding a person in vegetation.
446.6 Common Pitfalls
CautionPitfall: Ignoring Wind Effects on Battery Life
The Mistake: Planning UAV missions using manufacturer-stated flight times (e.g., “30 minutes”) without accounting for wind conditions, resulting in emergency landings or lost drones.
Why It Happens: Battery specifications are measured in ideal lab conditions (no wind, constant temperature, no payload). Real deployments face headwinds, crosswinds, and temperature extremes that can reduce flight time by 30-50%.
The Fix: Apply a wind penalty factor to flight time calculations. For every 5 m/s of wind speed, reduce expected flight time by 15-20%. Example: 30 min rated flight in 10 m/s wind becomes approximately 18-21 minutes. Always plan missions with 25-30% battery reserve.
CautionPitfall: Using Consumer Drone Range Specifications for Network Planning
The Mistake: Assuming the “7 km range” advertised for a consumer drone means reliable data communication at 7 km for IoT applications, leading to coverage gaps and failed missions.
Why It Happens: Advertised range is typically for low-bandwidth video streaming under ideal line-of-sight conditions. IoT data collection often requires bidirectional communication, acknowledgments, and operates in environments with interference.
The Fix: Derate advertised range by 50-70% for mission planning. Use 2-3 km as practical communication range for typical consumer drones in real deployments. Design multi-UAV relay architectures for areas exceeding single-drone range.
Show code
InlineKnowledgeCheck_kc_uav_features_2 = ({question:"An agricultural survey company needs to map crop health across a 500-hectare (5 km squared) farm using multispectral imaging that requires flying at 50 m altitude. Their UAV has a 25-minute battery life and covers 0.2 km squared per battery cycle (including take-off, landing, and data capture time). What is the minimum number of battery swaps needed to complete the full survey?",options: ["20 battery swaps (21 flights total)","24 battery swaps (25 flights total)","29 battery swaps (30 flights total)","49 battery swaps (50 flights total)" ],correctAnswer:1,feedback: {correct:"Excellent calculation! 25 flights requiring 24 battery swaps is correct. Total coverage needed: 5 km squared farm divided by 0.2 km squared per flight = 25 flights required. Battery swaps: The first flight uses the initial battery. Flights 2-25 each require a fresh battery swap. Therefore: 25 flights - 1 initial = 24 swaps.",incorrect: ["While 20 swaps seems logical, this incorrectly assumes you can do 5 flights on one initial battery set. The problem states the UAV covers 0.2 km squared per battery cycle, meaning each battery supports exactly one complete flight segment.","If you calculated 30 flights needing 29 swaps, you may not have accounted for the UAV's actual coverage rate. The problem explicitly states 0.2 km squared per battery cycle. Simple division: 5 km squared divided by 0.2 km squared per flight = 25 flights.","Calculating 50 flights with 49 swaps suggests confusing the farm area with coverage area per battery. Double-check: problem clearly states 0.2 km squared coverage per flight, not 0.1 km squared." ] },difficulty:"easy",learningObjective:"Apply energy constraints to UAV mission planning and calculate operational requirements"})
446.7 Common Misconceptions
WarningMisconception: “UAVs can fly indefinitely with solar panels”
Reality: Solar panels extend flight time but don’t enable unlimited operation.
The Numbers: - Small UAV power requirement: 100-300W (quadcopter hovering) - Solar panel on 1m wingspan: 30-60W maximum (optimal sun) - Net deficit: Still need 70-250W from battery - Solar extension: Adds 20-40% flight time in sunny conditions (30 min becomes 36-42 min)
Why the limitation?: 1. Power density: Solar cells provide approximately 200 W/m squared, UAV needs 200-500 W/m squared wing area for flight 2. Weight penalty: Solar panels add 200-400g, reducing payload or requiring bigger motors 3. Weather dependency: Clouds reduce output by 50-80%; no power at night 4. Attitude angle: UAV maneuvers change panel angle to sun, reducing efficiency 30-60%
Exception: High-altitude long-endurance (HALE) UAVs like Airbus Zephyr with massive wingspans (20-25m) CAN achieve multi-day flight, but these are specialized research platforms costing millions.
Practical IoT approach: - Battery rotation strategy (2+ UAVs alternating 30-min shifts) - Ground charging stations at mission waypoints - Hybrid: Solar extends patrol time 30-40%, then land for fast charge
446.8 Knowledge Check
Test your understanding of UAV network features with these questions.
NoteQuiz: UAV Network Features
Question 1: A UAV battery provides 30 minutes of flight time. The mission requires 60 minutes of coverage over a remote area. What is the most energy-efficient solution?
Explanation: Battery constraints are the primary limitation affecting mission duration. Two UAVs provide continuous coverage through rotation. Higher altitude or speed actually increases energy consumption. Flying faster dramatically reduces flight time because energy is proportional to speed squared or cubed due to aerodynamic drag.
Question 2: Regulatory bodies restrict autonomous UAV operations in many areas. What technical approach helps UAV networks operate within regulations?
Explanation: UAV regulatory compliance requires technical mechanisms including geofencing (autopilot stores prohibited area coordinates), altitude limiting (pressure sensors enforce maximum altitude), return-to-home (GPS/communication loss triggers autonomous return), and remote ID (broadcasts UAV ID and location for authorities).
446.9 Summary
This chapter explored the core features and challenges of UAV networks:
Core Capabilities: Flexible topology, wide coverage from altitude, multi-tasking ability, rapid deployment, SDN-enabled management, and energy-efficient design options
3D Mobility Challenges: UAVs move at 10-30 m/s in three dimensions, creating rapidly changing topologies that require real-time routing protocols
Energy Constraints: Limited battery capacity (15-45 minutes) drives critical trade-offs between payload weight and flight duration
Environmental Effects: Wind reduces battery life by 30-50%, temperature affects battery performance, and weather impacts both flight stability and radio communications
Communication Planning: Coverage radius calculations must account for altitude, path loss, and regulatory constraints
446.10 What’s Next
The next chapter examines UAV Network Topologies, comparing star and mesh configurations and helping you select the appropriate topology for different mission requirements.